In this post, we will discuss the construction, speed control, and characteristics of DC shunt motors.
Construction of Shunt DC Motor
The field winding of the DC shunt motor is wound with many turns to increase the flux linkage, and the armature winding is designed to carry a higher current. This is done because the torque is proportional to the armature current and the flux.
DC shunt motor is a self-excited type of motor because the field and armature winding are energized with the same DC supply.
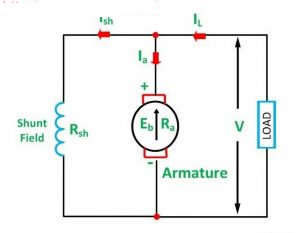
The armature winding and the field winding are connected in parallel, and a DC supply is applied to both windings.
DC Shunt Motor Equations
When the DC voltage (V) is applied to the field and armature winding, the back EMF (Eb) is induced in the armature winding, which opposes the applied voltage.
The armature current
Ia= Eb/Ra
Where,
Ra- The armature resistance,
Eb- Back EMF
The applied voltage (V) is equal to the Ia*Ra voltage drop plus back EMF(Eb).
V = IaRa + Eb ———–(1)
Ia = Itotal- Ish ———(2)
V = Eb+( Itotal-Ish)Ra —–(3)
The field current is ;
Ish= V/ Rsh ————(4)
Where, Rsh- The Resistance of field winding
The field current remains constant for a fixed applied DC voltage(V).
Characteristics of DC Shunt Motor
Torque- Armature Current (T-Ia)characteristics
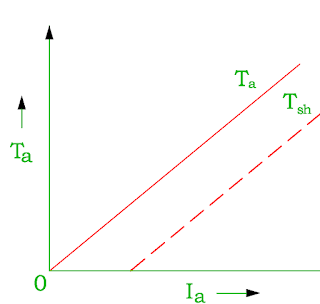
If the applied voltage is kept constant, the field flux remains constant. The torque of the DC motor is proportional to the product of the flux and the armature current.
Ta 𝝰 Φ Ia
Ta 𝝰 Ia ( Φ constant)
The characteristic of torque and armature current is a straight line from the origin. The shaft torque is always less than the gross torque. This is because of stray losses.
The heavy starting loads require more armature current, so the shunt motor should not be started on heavy loads.
Speed- Armature Current(N-Ia) characteristics
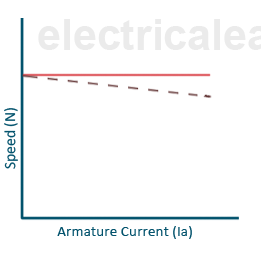
The speed of the motor is directly proportional to the back EMF(Eb) and reciprocal to the flux.
N α Eb / Ф
The back EMF(Eb)= V-Ia.Ra
With an increase in the armature current with a load, the back EMF decreases very small due to a small IaRa voltage drop as the armature resistance value is very low. The flux also decreases with an increase in load current due to the armature reaction. Thus, the ratio of Eb/Φ remains almost constant, and the motor speed is almost constant with an increase of armature current with loading. Therefore, the DC shunt motor is a constant-speed motor.
Speed-Torque(N-T) characteristics
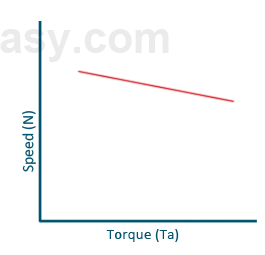
The change in the speed of the motor is negligible with the torque.
How does the DC Shunt Motor Maintain the constant Speed?
When the loading on the motor is increased, the speed of the motor decreases momentarily. With the speed reduction, the back EMF also gets reduced—consequently, the armature current increases because of the reduction of the back EMF.
Ia= (V-Eb)/Ra
The increased armature current produces more torque. The increased amount of torque increases the speed and provides compensation for speed loss on loading.
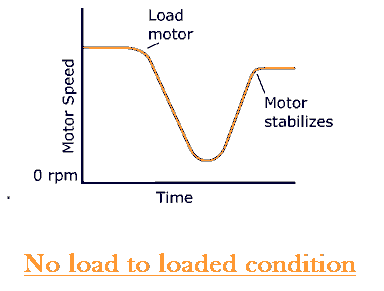
Thus, the motor maintains the constant ratio of Eb/flux and constant speed.
DC shunt motor should not be started at heavy loads
The DC shunt motor should not be started at load. The back EMF (Eb) is zero when the motor is started. The DC shunt motor draws a large armature current because the back EMF is zero at the start. If the motor is started at a heavy load, the armature current exceeds to a greater extent. The large armature current causes heating in the armature winding, and the insulation of the armature winding might fail. Therefore, the DC shunt motor should not be started at heavy loads.
Read Next: